Uber self-driving car crash event _ basic architecture
In the early hours of the 19th local time, Uber, a self-driving car, killed a woman crossing the road in Arizona. Uber was pushed to the cusp of the first time because of the first death of a self-driving car on a public road.

However, just a few hours later, the director of the Tempe Police Department in Lisanna, who was responsible for investigating the accident, said that according to preliminary investigations of the accident, Uber may not be at fault in the traffic accident.
The reversal of the plot makes people feel a little confused.
From the scene of the accident scene and the configuration of the Uber accident car, the radar and camera "dereliction of duty" or original sin
In order to restore the truth of the accident, the Tempe Police Department of Lisanna announced a video taken by the accident car. From the accident scene video, Uber's auto-driving accident car (Volvo XC90) was speeding at a time when the light environment was extremely poor, and even on the completely dark road, the only light came from the car headlights. The victim is in such an environment that "suddenly" appears in front of the car, and the car is extremely fast, and is instantly knocked down. Obviously, neither the testers in the car nor the self-driving cars have responded in time.

However, if people don't respond, the auto-driving car should not respond. The emergence of self-driving cars, is it only to liberate the driver's hands, "driving technology" is only equal to the human driver?
The answer is obviously no.
So, what is it that makes Uber’s self-driving car “dereliction of duty� Before answering this question, it is necessary to understand how the accident car is driving automatically.
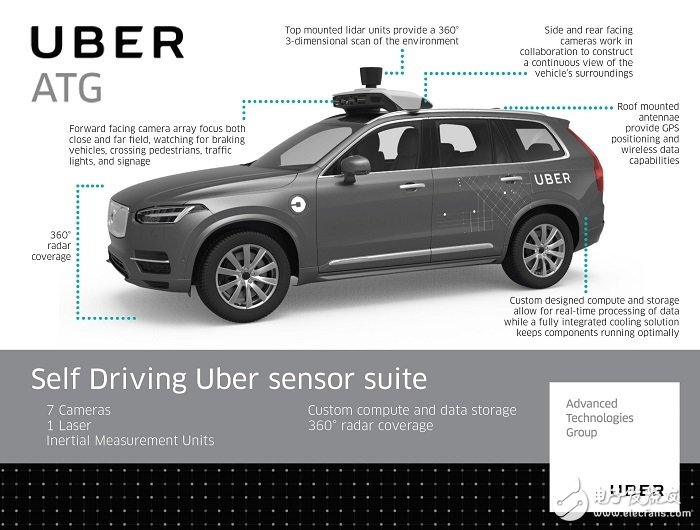
According to the scene of the accident scene, Uber's accident auto-driving car was developed by its ATG (Uber Advanced Technology Division). According to Uber's previously published information, the car should be equipped with a complete set of sensor systems:
The top lidar is capable of generating 3D imaging around the car at multiple times per second;
Front-end radio wave radar, located in front of and behind the car, can achieve 360-degree detection without dead angles;
Short- and long-focus optical cameras for real-time analysis of imaging.
Obviously, Uber hopes to be able to detect in real time and in full range through this sensor system, but the accident still happened.
In this case, the biggest possibility of accidents is that the performance of each sensor is insufficient and the matching scheme is unreasonable. It can even be said that it was precisely because of the poor cooperation between the top and front-end radar and the camera image processing that the accident occurred.
Self-driving cars want to be safe on the road, you need to understand the characteristics and deficiencies of each sensor.
For Uber’s accident, Mark Rosenk, former chairman of the US National Transportation Safety Board, said that this accident or a hindrance to the future development of autonomous driving technology must try to solve the problems in order to regain public awareness of autonomous vehicles. trust. Obviously, radar and camera are the top priority of these issues.
radar
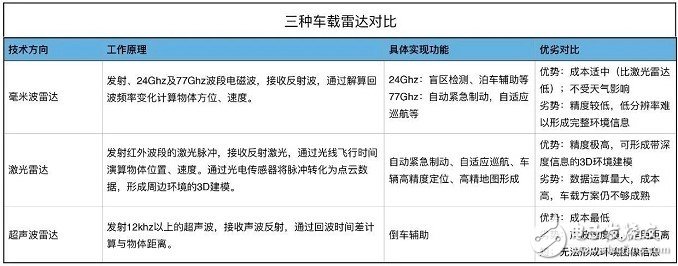
In terms of radar, there are currently three types that have been widely used in the field of autonomous driving: laser radar, ultrasonic radar and millimeter wave radar.
Lidar
Lidar, also known as Lidar, is a collection of lasers and radars. It usually has 16 lines, 32 lines and 64 lines. The more harnesses, the stronger the performance.
Lidar, which operates in the infrared and visible light bands, has a high detection accuracy and a wide detection range. It can distinguish obstacles in a short time, in addition to normal operation in poor lighting conditions.

However, it is easily disturbed by "miscellaneous" in the environment, so it performs poorly in extremely short weather such as rain and snow, and cannot provide round-the-clock service. Such radars are extremely costly, so a car usually has only one and is at the top.
Ultrasonic radar
Ultrasonic radar detects by transmitting close-range ultrasound and collecting and analyzing reflected data. Such radars have slower energy consumption and strong penetrability, and have great advantages in short-distance measurement. In addition, because of its simple method of ranging, this type of radar is very low cost.
In addition to autonomous driving, ultrasonic radar has been widely used in the automotive field, such as warning obstacles within 3 meters, helping the driver to stop.
Millimeter wave radar
The millimeter wave radar is a radar that works in the millimeter wave band and can penetrate fog, smoke and dust. It has the characteristics of all weather (except for heavy rain) and all-day time, and is extremely sensitive to metal. Since the optical region corresponding to the short wavelength of the millimeter wave is small, it is more suitable for close detection under 30 km, but it can only recognize that there is a group of things in front, and it is not known what is specific.

Because of its low cost and relatively mature technology, millimeter wave radar is the most commonly used in current autonomous driving sensors.
camera
Compared with the radar, the camera is relatively simple. Its main function is to collect images through the lens, and then process the image through the photosensitive component circuit and control component in the camera and convert it into digital signals that can be processed by the computer, thereby realizing the perception of the periphery of the vehicle. Road conditions, forward collision warning, lane offset alarm and pedestrian detection.
Currently, the car camera has four categories: monocular camera, rear view camera, stereo camera and surround camera. Among them, the market mainly focuses on monocular cameras.
Throughout the major self-driving cars, most of the options are mixed with the above equipment to form a complete sensor detection system. The Uber self-driving car, which was killed by a collision, is equipped with a Uber's own laser radar on the top, and is equipped with multiple radio wave radars and short-range and long-range optical cameras.
Although it is not known how Uber's self-developed laser radar and other sensors used actually perform, it is certain that, in addition to the limited performance of the sensor itself, Uber's self-driving car under this collocation scheme has an accident. The program must not be able to achieve 360 ​​degrees without dead angle detection, it is not enough to ensure that the car in normal lighting conditions, extreme weather and other conditions.
So, what kind of matching scheme is the most reasonable, and can avoid the occurrence of security accidents to the greatest extent?
Tesla is mainly based on cameras, Baidu is mainly based on radar, and each has its own advantages and disadvantages.
Like Uber, Tesla is also very keen on the development and road test of self-driving cars. On October 20th, 2016, Musk announced that it will be equipped with the Autopilot 2.0, a hardware system with full autopilot capability, for all new Tesla vehicles. The general match is as follows:
1. 6 front and 6 tails, a total of 12 ultrasonic sensors;
2. The front windshield under the front windshield, the telephoto, the standard, the short coke, a total of 3 front view cameras;
3. There are 2 rear view cameras on both sides of the rear end of the front wing of the exterior mirror;
4. There are 2 side view cameras on both sides of the upper and middle doors of the front and rear doors;
5. A rear view camera in the middle of the upper part of the rear window;
6. A reversing camera on the rear license plate position;
7. One millimeter wave radar in the middle of the front bumper.

Obviously, Tesla's hardware system lags behind Uber and consists of a millimeter wave radar + camera + ultrasonic sensor. From this collocation, the overall input cost is low, not only without the lidar blessing, but also with the camera, the fully automatic driverless system is priced at only 8,000 US dollars.
It can be said that the system does not have the ability to detect in low light conditions, nor can it provide long-distance detection services for automobiles. It may be because of this that the road test and application of Tesla's self-driving cars have not been very smooth.
Back home, in the field of automatic driving, Baidu unmanned vehicles can be described as the limelight in the near future. In the past few days, they got the first batch of temporary license plates for the automatic driving test in Beijing, and they opened the automatic in Beijing Yizhuang. Driving a car on the road test.
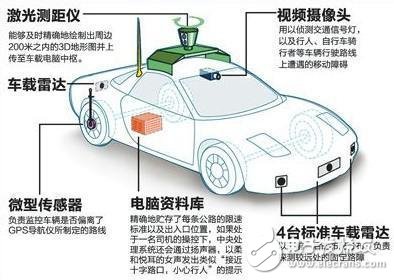
From this network of Baidu unmanned vehicle hardware configuration diagram, Baidu's sensor system is based on the radar + camera supplement, to achieve automatic driving, including a roof of Velodyne laser radar; multiple vehicle radar , distributed at the front and rear of the car; a camera for detecting moving obstacles.
This kind of matching method realizes long-distance detection of the car. In addition, compared to Tesla, thanks to the Velodyne laser radar (unit price of about 70,000 US dollars), the Baidu self-driving car has the driving function in dark and dense environment. Of course, the cost is relatively high.
The matching plan should be adapted to local conditions, and the application scenario is the focus.
In fact, the above is just a basic judgment of the car's automatic driving performance based on common application scenarios. Whether it is Uber, Tesla or Baidu, in the current road test phase, they can't guarantee that their own self-driving cars can drive safely in any environment.
For example, on a highway, because of the faster speed and wider field of view, autonomous vehicles need to have the ability to detect over long distances and in large areas. Due to the openness of the road, it is inevitable to encounter extreme weather such as rain, snow and fog. Then ordinary cameras and high-cost laser radars cannot support this demand. In this case, hardware systems such as Baidu. It is not practical.
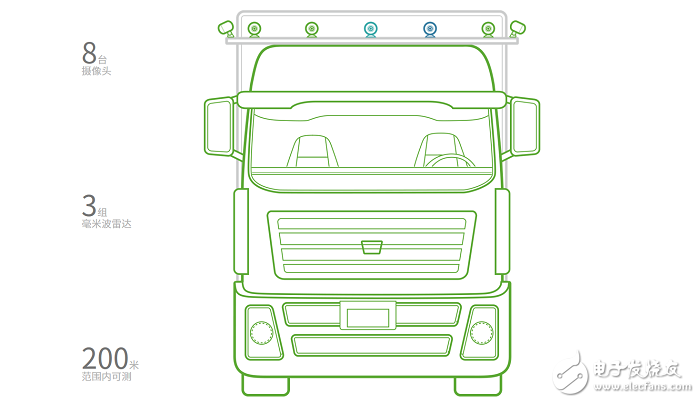
"In the high-speed highway, due to the laser radar's range problem, we rely more on the camera." Tucson future co-founder & CEO Chen Mo said.
Therefore, Tucson, which is committed to building L4-class (SAE) self-driving trucks in high-speed scenes, is based on long-distance, high-sensing cameras. On a truck, a total of 8 cameras and 3 sets of millimeter-wave radars are available, with a range of up to 200 meters.
In addition to highways, urban streets are also one of the largest applications for future self-driving cars. In this scenario, long-range and large-scale detection can not meet the actual needs.
The characteristics of China's urban streets are crowds, vehicles, and buildings; there are many signal lights and signs. In order to do safe and automatic driving in such an environment, the car must have real-time accurate detection, highly perceived environment (ambient light, obstacle details and status, etc.) and high-speed recognition and analysis of images. In this case, there are some cameras and millimeter-wave radars that are not enough. They must be equipped with high-precision laser radars, even more than one.

“Currently, autonomous vehicles are equipped with laser radar, most of which are designed to meet functional requirements.†Suzuki said that “To ensure safety, it is necessary to emphasize safety redundancy and increase system reliability through multiple backups.†Cruise I used 5 laser radars to solve this problem."
Lithium Battery Pack For Hybrid Electric Locomotive
Lithium Battery For Electric Car,Cylindrical Battery,2000-2500Kw Lifepo4 Battery System,Ce Certificated Lithium Battery
Henan Xintaihang Power Source Co.,Ltd , https://www.taihangbattery.com