Automatic driving and intelligent traffic will effectively solve traffic jams and vehicle collision problems
Currently there are two causes of traffic jams: 1 traffic lights; 2 traffic jams caused by traffic flow fluctuations caused by the driver’s own emotions, fatigue, and other biological factors. The biggest cause of vehicle collisions is human biological factors. The self-organized cooperative driving based on vehicle-road coordination and automatic driving will effectively solve the problem of traffic jam and vehicle collision.
How are traffic jams and collisions caused?
Causes of traffic jams
There are many causes of traffic jams. There are several reasons for removing road construction or some sudden and special conditions:
1. Traffic lights are the main cause of traffic congestion. Each car waiting for the red light line has its own acceleration process, because there is no space between the car and the car because the acceleration is not the same. This reduces the efficiency of all traffic lights passing through the traffic light.
When waiting for a red light, the driver often fails to find the red light to turn green because he is playing a mobile phone. When the rear dragon horn is loud, he can recover. This "mobile phone dependence" can increase traffic jams.
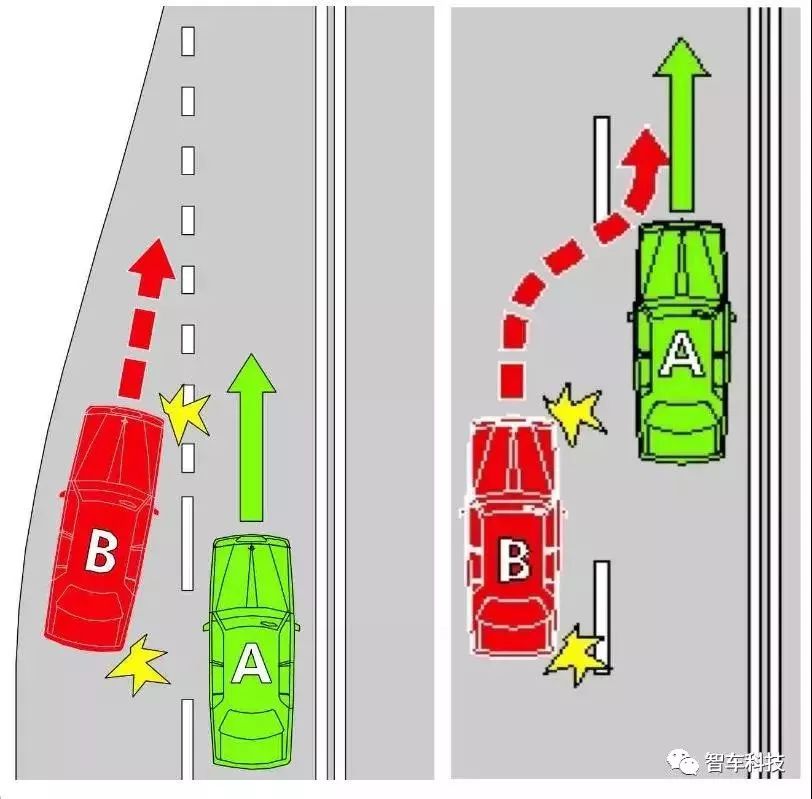
2. Traffic accidents are prone to traffic jams. On highways or high-speed roads with large traffic volumes, many drivers are hurrying to get on the road and often change lanes or overtaking suddenly. In this process, due to the excessively high speed, drivers do not respond in time, and it is easy to cause vehicle collisions, thus stopping at highways or at high speeds. Caused by congestion, Xiaobian Wuyi returned a total of 200 kilometers to the high speed, there have been 5 traffic accidents. After the observation of Xiao Bian, many drivers hurry back to the road often change lanes or overtaking, and some drivers often go Emergency lanes, Xiaobian heart countless "grass and horses" Pentium and passing back to catch anyone who is anxious, the most urgent on the nm. The consequence was that it caused the vehicle to collide, causing congestion, but it prolonged the return time. Xiao Bian thought that if everyone complied with the rules and unified the speed, they would certainly walk faster if they did not change the road. Strictly speaking, in fact, the occurrence of traffic accidents can be attributed to the fluctuation of traffic flow, and the fluctuation of traffic flow is essentially caused by human's own emotional, fatigue and other biological factors.
3. Traffic flow fluctuations can easily cause traffic jams. When we are driving at high speeds, we often find that traffic jams often occur in the absence of any construction or traffic accidents. What is this all about?
The flow of traffic generated by the vehicle is called traffic flow. In a continuous traffic flow system, it is originally a small disturbance. Just like there is a small road on the road, or the driver has a small difference and then touches the brakes, it is easy to cause congestion. . If there are enough vehicles on the freeway, any disruption in traffic flow will result in a cyclical, amplified chain reaction: a car will brake slightly and the car behind it will brake. To be a little heavier so as not to crash into the car in front, the final brake volume is increased step by step, until the traffic flow fluctuations, traffic slows or even stops.

A car gently brakes, the car behind will increase a little brake
Even if a vehicle drives out of this area of ​​traffic flow fluctuations, such fluctuations do not disappear by themselves: they gradually move backwards, that is, they move in the opposite direction of the vehicle. “This kind of traffic flow is usually 100 to 1000 meters in length, and it usually starts with the sudden increase in traffic density and the simultaneous decline in speed.†Some researchers said that “after the fluctuations have passed, the traffic flow will gradually become faster.â€
Researchers used computer algorithms to simulate driving behavior and proposed the concept of a wave phenomenon, the so-called “jamitonâ€, because they are similar to the so-called “soliton†in physical waves. A single beam of light in the optics is called a solitary wave. Its short wavelength, theoretically stable transmission, no distortion, was tested in the field of optical fiber communications.
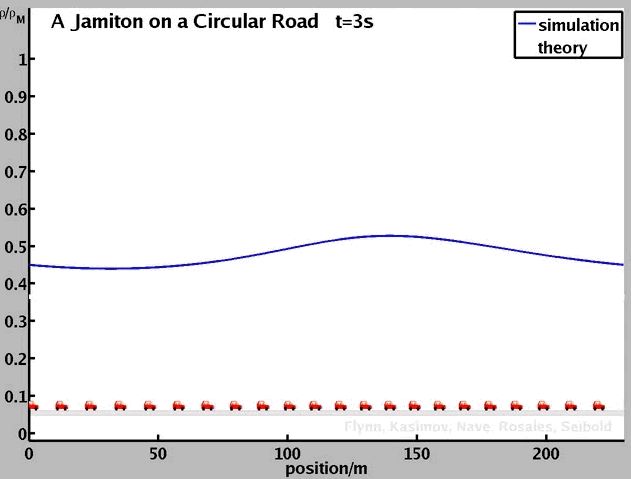
Another group of researchers conducted an on-site experiment and reached the same conclusion. In one of the experiments, they had 22 drivers at the same speed (27 kilometers per hour) and kept the same distance between cars and traveled on a small loop. Inevitably, fluctuations in traffic flow have formed. (Click on the video to see the experiment process)
In a sense, it seems reasonable to attribute the traffic jam caused by this traffic flow fluctuation to individual drivers. The model shows that these plugs are likely to be formed as follows: people want to drive as fast as possible, and finally have to brake in order to avoid colliding with vehicles in front, which triggers a series of chain reactions.
Some researchers said that if people estimate that the traffic density in front of them is getting larger, remove their feet from the throttle earlier and leave more room in front of the car - instead of waiting until the brakes must be finally applied - this will prevent traffic jams. happened. And Berthold Horn, a computer scientist at the Massachusetts Institute of Technology who is working on the same topic, said that another way of thinking about this issue is to keep driving in the middle of the car in front of you and behind you. This will allow you to avoid sudden braking.
The researchers also mentioned that we usually tend to think that this must be caused by a single driver, but the model shows that even if all drivers follow the same rules and no one does anything wrong, these fluctuations will still occur. These traffic jams, in essence, will happen as long as enough people drive on the highway. Therefore, the only way to eliminate them may be to give the steering wheel to "non-human drivers."
Cause of vehicle collision
The data shows that traffic accidents account for a large proportion of road traffic accidents due to drivers. The analysis of road traffic deaths in the country from 1988 to 1992 shows that the number of deaths caused by the driver’s fault accounted for more than 60% of all deaths, plus approximately 70% of unlicensed drivers. Judging from the effect of the illegal activities that caused the accident, the order from big to small is: speeding, illegal operation, illegal overtaking, reverse driving, illegal loading, and drunk driving. These violations reflect the driver’s weak legal system and lack of strict compliance with traffic regulations. Reasons for collisions caused by improper driving by drivers are:
1. Poor observation, that is, in the case of a good vision, ignores or responds to dangerous situations that should have been discovered.
2. Inadequate measures, although finding the danger in time and adopting avoidance measures, they have adopted erroneous avoidance measures due to errors in judgment, hesitation, and tension, or have not taken evasive measures.
3. Fatigue driving and fatigue driving are also important factors leading to accidents, especially for vehicles driving on the expressway in the early morning and after lunch. It is not uncommon for traffic accidents to occur due to fatigue driving.
4. Drink or poison driving.
Traffic jams and collisions are the product of vehicles competing for traffic rights
To find out the nature of traffic jams and collisions, the higher level goes back to the essence of traffic and modern ground traffic control. In fact, the ground transportation control system has been developed for more than 100 years. Many researchers used the electrical traffic lights in Cleveland, Ohio, USA in 1914 as the real starting point of the ground traffic control system.
However, under the increasing traffic demand pressure, traffic jams, collisions and other situations often occur, and existing traffic control methods have gradually reached the performance ceiling. How to develop future ground traffic control is an important issue for all researchers.
The nature of transportation is the transfer of people or things in space and time. The core of ground traffic control has always been how to use various methods to reasonably and efficiently assign road traffic rights in time and space, and to solve the problem of vehicle conflicts that may occur when people pass through traffic conflict areas. The vehicle collision problem generally refers to Traffic jam and vehicle collision.
The so-called road traffic rights (referred to as road rights) can be understood as the preferential possession and use rights of road resources in a specific space-time scope.
Ground driving needs to ensure that at most only one vehicle exists in a specific time and space. In other words, if we divide the road resources into space-time grids based on the two dimensions of time and space, with the minimum time and the minimum space as the unit of division, then each grid can only be occupied by at most one vehicle. If this rule is violated, collisions will occur. Traffic jams are also caused by the congestion caused by cars wanting to compete for road rights.
After more than 100 years of development, the highway transportation system has generally experienced the period of no control, the period of control of traffic sign markings, the control of traffic lights, and the period of intelligent traffic control. It will gradually enter the period of self-organized cooperative driving in the future.
Uncontrolled period: Most people initially follow the basic principle of "first come first, mutual reciprocity" when they encounter disputes of road rights. Based on the results of their own eyesight, the drivers of both parties decide who should be given priority through the conflict area and drive each one in accordance with the tacit agreement. In fact, this is the basic way of determining the right of way that has been followed since the time of walking, riding and driving a carriage.
Traffic sign marking control period: road traffic signs are usually some graphic symbols and text information; road traffic markings are composed of road markings, arrows, text, facade signs, prominent roadsides, and road contours. Marking marks clearly identify road rights, preemptive rights, and occupation rights in road use rights. In particular, the introduction of lane lines greatly simplifies the distribution of vehicle road rights and reduces the risk of collisions with vehicle collisions. However, it is difficult for the traffic sign markings to provide orderly and safe control of the road rights of vehicles in different directions in traffic conflict points (crossroads and exit ramps). Therefore, traffic signal control has become the focus of research on ground transportation control.
Traffic Signal Control Period: During this period, traffic lights were introduced. On the one hand, the introduction of the traffic lights improved the traffic at the intersections, and on the other hand, it reduced the driver’s information load, thus reducing the driving burden. People only need to follow a unified traffic light rule and keep a distance from the vehicle ahead. It does not take time and effort to communicate with drivers in other directions, which greatly reduces the accident rate at road intersections.
Intelligent traffic control period: With the deepening and popularization of the concept of intelligent transportation system, urban traffic control has turned to the direction of informatization and intelligence. Traffic signal control began to use computer networking control.
Global traffic jams occur from time to time every year, and the traffic accident rate remains high. Traffic efficiency and safety issues have always plagued traffic managers and travelers. One of the important reasons is that there are still considerable limitations in the control of marking and traffic signals.
Self-organizing cooperative driving can effectively solve traffic jams and collisions
Self-organizing cooperative driving refers to the combination of automatic driving and vehicle-road coordination. The core of self-organizing cooperative driving is to determine the time sequence of vehicles passing through intersections and to enable vehicles to run at the same speed. In this way, traffic jams and collision problems can be solved.
Vehicle-road coordination refers to the information interaction and coordinated control between the vehicle-to-vehicle and the vehicle-to-road so that each vehicle can perceive the peripheral vehicle's movement information, intersection signal status, and road environment information in real time. The vehicle's own information can also be transmitted to surrounding vehicles and roadside equipment via communication means. This will allow vehicles to determine road rights more rationally and accurately.
First, the acquisition of full-time-space-aware information allows us to reduce or even avoid the possibility of misjudging the collision in a particular space-time region. The granularity of the distribution of road rights is greatly refined, and the distribution of road rights will cover the entire road time and space, and solve the distribution of road rights at any time and space.
Secondly, the traffic control system can use the vehicle and road to obtain real-time information on the vehicle's position, operating speed and other information, and further optimize the calculation of the signal lamp timing.
Furthermore, we can quickly convey traffic rights ownership information to traffic participants where there are no signal lights. The development of road and road coordination technology has created a huge network between people, vehicles, roads and other transportation elements. Information perception, information exchange, and information sharing are everywhere. The right-to-road hints will become more intuitive and easy to understand, and the burden on human drivers will be greatly reduced.
Based on self-organizing cooperative driving of real-time dynamic information of each vehicle, "cooperative utilization" of road rights allocation can be realized. For intersection traffic control, our decision variable becomes the space-time trajectory of each vehicle passing through the intersection. Based on these space-time trajectories, we can easily define that the control objective function is the minimum transit time for the entire vehicle, or the average transit time is shorter. The collision avoidance requirements between vehicles can also be set directly from the relative position of the space-time trajectory. Simulations show that co-driving can significantly increase the traffic capacity of intersections when the traffic pressure does not lead to excessive saturation at the intersection.
The above points out:
Currently there are two causes of traffic jams: 1 traffic jams caused by traffic lights; 2 traffic jams caused by traffic flow fluctuations caused by the driver's own emotions, fatigue and other biological factors.
The biggest cause of vehicle collisions is human biological factors.
Automatic driving can ease traffic jams caused by traffic flow fluctuations
Some researchers used computer simulations to show how self-driving cars can avoid traffic jams caused by traffic flow fluctuations: Even if there are few auto-driving cars in the traffic stream, they can avoid traffic jams by adjusting their own speed.
As long as there are 2% of self-driving cars, 50% of stop-and-go situations can be reduced.
The acceleration and deceleration of self-driving cars are determined by a series of calculations that can perceive changes in road conditions stronger than humans, and the reserved car spacing is greater. When the traffic is relatively dense, the autopilot car will keep a certain distance and reduce the number of sudden braking, thereby reducing the impact on the rear vehicles.
The researchers said that a more creative idea is Variable Speed ​​Limits, which has been adopted in some parts of the United States (but mainly to change the speed limit according to weather conditions). Using the LED sign, the speed limit of the “traffic flow-induced traffic jam†area can be adjusted downwards to gradually slow down the vehicle instead of suddenly decelerating. In some cases, this method may break traffic fluctuations.
To sum up, simply speaking, the road traffic coordination under intelligent traffic can solve the problem of traffic lights. Autopilot can solve the problem of traffic flow fluctuation and vehicle collision caused by human biological factors. Therefore, self-organizing cooperative driving based on vehicle-road coordination and automatic driving will effectively solve the problem of traffic jam and vehicle collision.
Plastic Tube Pressure Gauge,Plastic Pressure Gauge,Plastic Tube Manometer,Plastic Pipe Pressure Gauge
ZHOUSHAN JIAERLING METER CO.,LTD , https://www.zsjrlmeter.com