Analysis on the Application of Servo System in Robot Operation
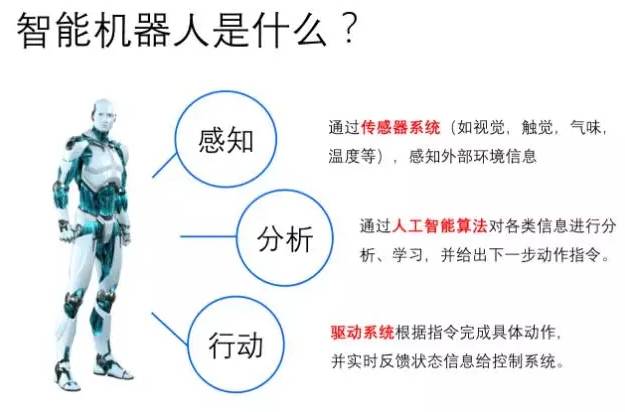
If it is said that the current hot technology, the robot is definitely one. As a typical mechatronics technology-intensive product, how does the robot operate?
Robot control is divided into two categories: mechanical body control and servo mechanism control. The servo control system is an important part of realizing robot mechanical body control and servo mechanism control. Therefore, to understand the operation process of the robot, the servo system must not be bypassed.
server system
Servo system is a product developed on the basis of frequency conversion technology. It is an automatic control system that takes mechanical position or angle as the control object. In addition to speed and torque control, the servo system can also perform precise, fast and stable position control.
The generalized servo system is a control system that accurately tracks or reproduces a given process, and can also be called a follow-up system.
The narrow sense servo system is also called the position follow-up system. Its controlled quantity (output quantity) is the linear or angular displacement of the space position of the load machine. When the position given quantity (input quantity) changes arbitrarily, the main task of the system is to make The output can quickly and accurately reproduce the change of a given amount.
The structure of the servo system
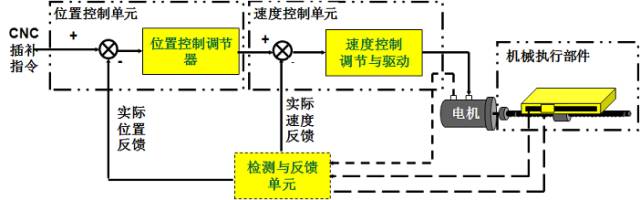
There are various structures and types of mechatronics servo control systems, but from the perspective of automatic control theory, servo control systems generally include five parts: controller, controlled object, execution link, detection link, and comparison link.
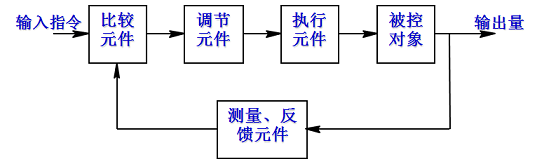
The principle block diagram of the servo system
1. Comparison link
The comparison link is the link that compares the input command signal with the feedback signal of the system to obtain the deviation signal between the output and the input, and is usually implemented by a special circuit or computer.
2. Controller
The controller is usually a computer or PID (proportional, integral, and derivative) control circuit. Its main task is to transform the deviation signal output by the comparison element to control the actuator to act as required.
3. Implementation link
The function of the execution link is to convert various forms of input energy into mechanical energy according to the requirements of the control signal to drive the controlled object to work. The executive components in the mechatronics system generally refer to various motors or hydraulic and pneumatic servo mechanisms.
4. The accused
The controlled object refers to the controlled object, such as a mechanical arm or a mechanical working platform.
5. Testing link
The detection link refers to a device that can measure the output and convert it into the dimension required by the comparison link, which generally includes a sensor and a conversion circuit.
Features and functions of the servo system
The servo system is essentially different from the feed system of the general machine tool. It can accurately control the motion speed and position of the executing part according to the instruction signal. The servo system is the link between the numerical control device and the machine tool, and an important component of the numerical control system. It has the following characteristics:
It must have a high-precision sensor that can accurately give the electrical signal of the output.
Both the power amplifier and the control system must be reversible.
Enough speed range and strong enough low speed load performance.
Fast response ability and strong anti-interference ability.
Type of servo system
According to the control principle: there are three types of open loop, closed loop and semi-closed loop
According to the nature of the controlled quantity: there are servo system forms such as displacement, speed, force and moment
According to the driving mode: There are electric, hydraulic and pneumatic servo driving forms
According to the actuator: There are stepper motor servo, DC motor servo and AC motor servo form
Actuating components of the servo system
1. Types and characteristics of actuators
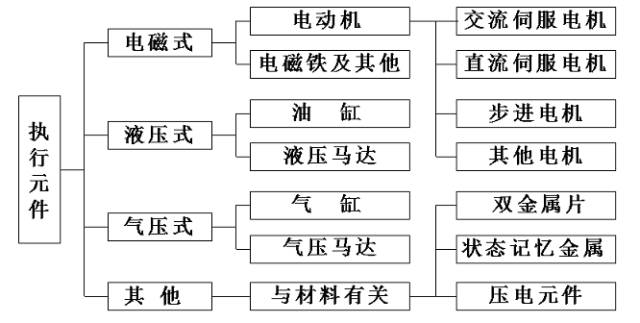
(1) Electric actuator
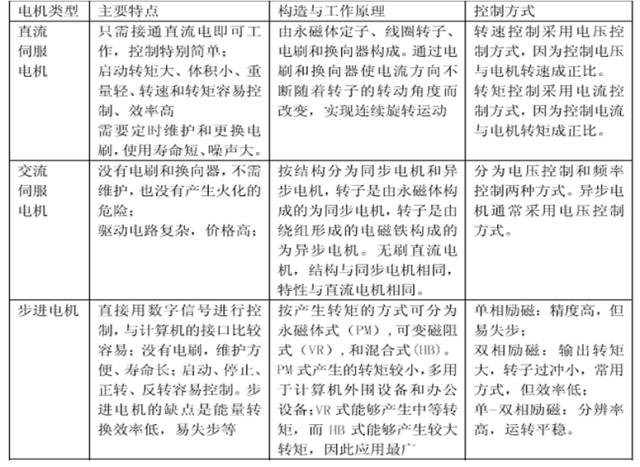
Electrical actuators include direct current (DC) servo motors, alternating current (AC) servo motors, stepper motors and electromagnets, etc., which are the most commonly used actuators. In addition to stable operation, servo motors generally require good dynamic performance, suitable for frequent use, and easy maintenance.
(2) Hydraulic actuator
Hydraulic actuators mainly include reciprocating cylinders, rotary cylinders, hydraulic motors, etc., of which cylinders are the most common. In the case of the same output power, hydraulic components have the characteristics of light weight and good speed.
(3) Pneumatic actuator
Pneumatic actuators are no different from hydraulic actuators except for using compressed air as the working medium. Although pneumatic drive can obtain greater driving force, stroke and speed, it cannot be used in occasions that require high positioning accuracy due to poor air viscosity and compressibility.
The difference between the three types
| species | Features | advantage | Disadvantage |
| Electric | Commercial power is available; the signal and power transmission direction are the same; there are AC and DC points; pay attention to the use of voltage and power. | Easy to operate; easy to program; can realize positioning servo control; fast response, easy to connect with the computer (CPU); small size, large power, no pollution. | Large instantaneous output power; poor overload; once stuck, it will cause a burn accident; it is greatly affected by external noise. |
| Pneumatic | The pressure of the gas pressure source is 5~7×Mpa; the operator is required to be skilled. | Convenient gas source and low cost; no leakage and environmental pollution; fast speed and easy operation. | The power is small, the volume is large, and it is difficult to miniaturize; the movement is not stable, and the long-distance transmission is difficult; the noise is large; and the servo is difficult. |
| Hydraulic | The pressure of the liquid pressure source is 20~80×Mpa; the operator is required to be skilled. | The output power is large, the speed is fast, the action is stable, and the positioning servo control can be realized; it is easy to connect with the computer (CPU). | The equipment is difficult to miniaturize; the requirements for hydraulic source and hydraulic oil are strict; it is easy to cause leakage and pollute the environment. |
2. Commonly used control motors
The control motor is the power component of the electrical servo control system. It is an energy conversion device that converts electrical energy into mechanical energy. Commonly used control motors in mechatronics products refer to servo motors that can provide correct or more complex actions.
Control motors include rotary and linear drive motors. Through the control of voltage, current, frequency (including command pulse), etc., constant speed, variable speed drive or repeated start and stop incremental drive and complex drive are realized, and the drive accuracy varies with the drive object Different for different.
(1) Servo drive motors generally refer to: Stepping Motor, DC Servo Motor, AC Servo Motor
(2) The control methods of commonly used servo-controlled motors mainly include: open-loop control, semi-closed-loop control, and closed-loop control.
The drive system of the closed-loop system has position (or speed) feedback links; the open-loop system has no position and speed feedback links.
a. Open-loop CNC system
There is no position measuring device, and the signal flow is one-way (numerical control device → feed system), so the system has good stability.

Without position feedback, the accuracy is not high compared to the closed-loop system. Its accuracy mainly depends on the performance and accuracy of the servo drive system and mechanical transmission mechanism. Generally, a power stepper motor is used as a servo drive component.
This type of system has the advantages of simple structure, stable work, convenient debugging, simple maintenance, and low price. It is widely used in occasions where the accuracy and speed are not high and the driving torque is not large. Generally used for economical CNC machine tools.
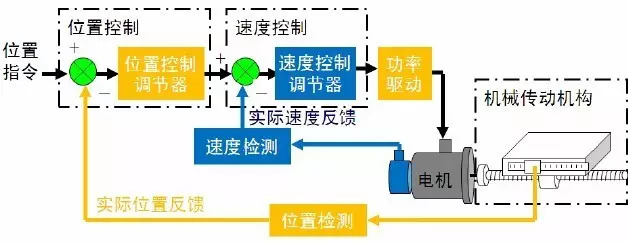
b. Semi-closed loop CNC system
The position sampling point of the semi-closed-loop numerical control system is shown in the figure. It is drawn from the drive device (commonly used servo motor) or the lead screw, and the rotation angle is sampled for detection, instead of directly detecting the actual position of the moving part.

The semi-closed loop does not include or only includes a small number of mechanical transmission links, so stable control performance can be obtained. Although the stability of the system is not as good as the open loop system, it is better than the closed loop. It is difficult to eliminate the movement error caused by the pitch error of the screw and the gear gap. Therefore, its accuracy is worse than closed loop and better than open loop. However, this type of error can be compensated, so satisfactory accuracy can still be obtained.
The semi-closed-loop CNC system has simple structure, convenient debugging, and high precision, so it has been widely used in modern CNC machine tools.
c. Fully closed loop CNC system
The position sampling point of the full-closed-loop numerical control system is shown as the dotted line in the figure, which directly detects the actual position of the moving part.
Theoretically speaking, the error, gap and loss of momentum in the entire drive and transmission links can be eliminated. It has high position control accuracy. Because the friction characteristics, rigidity and clearance of many mechanical transmission links in the position loop are non-linear, it is easy to cause the instability of the system, making the design, installation and debugging of the closed loop system quite difficult.
This system is mainly used for boring and milling machines, ultra-precision lathes, ultra-precision grinding machines and larger CNC machine tools with high precision requirements.
Robot Servo System
Under normal circumstances, what we call robot servo system refers to the precision servo system used in multi-axis motion control. A multi-axis motion control system is composed of a high-level motion controller and a low-level servo driver. The motion controller is responsible for the decoding of motion control commands, the relative motion of each position control axis to each other, acceleration and deceleration contour control, etc. The function is to reduce the path error of the overall system motion control; the servo drive is responsible for the position control of the servo motor, and its main function is to reduce the following error of the servo axis.
The robot's servo system consists of three parts: servo motor, servo driver, and command mechanism. The servo motor is the actuator, which realizes movement. The servo driver is the power supply of the servo motor. The command mechanism is for pulse or speed. It works normally with the servo drive.
Robots have higher requirements for servo motors than the other two parts. First of all, the servo motor is required to have fast response. The time for the motor from obtaining the command signal to completing the working state required by the command should be short. The shorter the response time to the command signal, the higher the sensitivity of the electrical servo system and the better the fast response performance. Generally, the size of the electromechanical time constant of the servo motor is used to illustrate the fast response performance of the servo motor. Secondly, the starting torque inertia ratio of the servo motor should be large. In the case of driving a load, the servo motor of the robot is required to have a large starting torque and a small moment of inertia. Finally, the servo motor must have the continuity and linearity of the control characteristics. With the change of the control signal, the speed of the motor can continuously change, and sometimes the speed needs to be proportional or approximately proportional to the control signal.
Of course, in order to match the body shape of the robot, the servo motor must be small in size, small in mass, and short in axial size. It also can withstand harsh operating conditions, can carry out very frequent forward and reverse and acceleration and deceleration operations, and can withstand multiple overloads in a short time.
Servo driver is an actuator that can directly or indirectly drive the robot body to obtain various motions of the robot by using the torque and force generated by various motors. It has the advantages of high torque-to-inertia ratio, no brushes, and reversing sparks. It is widely used in robots.
The development trend of servo system
As the application of servo systems becomes wider and wider, users have higher and higher requirements for servo drive technology. In general, the development trend of the servo system can be summarized as the following aspects:
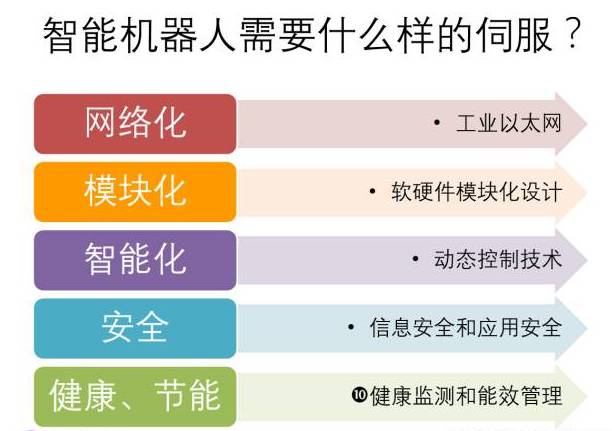
Integration: More and more new power semiconductor devices with high switching frequency are used in the output devices of the servo control system. This device isolates the input, energy consumption braking, over-temperature, over-voltage, over-current protection and fault diagnosis, etc. The functions are all integrated in a small module to form a high-precision full closed-loop adjustment system. The high degree of integration has significantly reduced the volume of the entire control system.
Intelligence: The intelligence of the servo system is manifested in the following aspects: all operating parameters of the system can be set by software through man-machine dialogue; they all have fault self-diagnosis and analysis functions; parameter self-tuning functions, etc. The servo unit with self-tuning function can automatically tune the parameters of the system through several trial runs, and automatically realize its optimization.
Networking: Servo system networking is an inevitable trend in the development of integrated automation technology, and is a product of the combination of control technology, computer technology and communication technology.
Simplification: The "simplification" mentioned here is not simple but simplification. According to the user's situation, the servo function used by the user is strengthened to make it specialized and refined, and some functions not used are streamlined, thereby reducing the servo System cost, creating more benefits for customers.
The performance of the robot is greatly affected by the servo system, so the key performance indicators of the precision servo system will always be the primary factor in the advanced comparison. Foreign advanced servo systems have been well adapted to the needs of most applications, and their R&D resources are concentrated on individual high-end applications and overall performance improvement, and are in the stage of meticulous carving. In the context of Industry 4.0, domestic servos have a long way to go and still need to work hard to catch up.
â—High-efficiency, energy-saving design, full display of green concept from inside to outside
The system adopts a high-efficiency rectifier, the peak efficiency of the rectifier is greater than 96.2%, and the power consumption of the rectifier sleep is as low as 4W or less.
â—The rectifier module is small in size and high in power density, improving the utilization of cabinet space
â—Fully digital design, more stable performance
The rectifier adopts DSP+MCU dual digital circuit control mode, the system adopts CAN+RS485 dual bus control, the system power supply reliability is higher, and the transmission rate is faster.
High efficiency rectifier
Changzhou Changyuan Electronic Co., Ltd. , https://www.cydiode.com