Analysis of the world's most advanced Da Vinci surgical robot technology
Is Da Vinci not a great artist of the Italian Renaissance, and what is the relationship with the Da Vinci robot-assisted Surgical System, the most widely used in the world? It is said that the surgical robot "Da Vinci" is a robot for medical surgery based on the prototype of the robot painted on the drawings by Leonardo Finch 500 years ago, and is named after "Da Vinci".
The past and present of the Da Vinci surgical robot
In fact, the more formal name of the Da Vinci surgical robot is the “endoscopic surgical instrument control systemâ€, which is designed, produced and sold by IntuiTIve Surgical, which was founded in 1995 in Sun Valley, California.
The Da Vinci robot technology originated from the Stanford Research Institute (SRI) with an official background. In the late 1980s, a group of scientists began research and development of surgical robots at the Stanford Research Institute. The original intention was to develop robots suitable for field surgery. In a follow-up study, surgical robots attracted the attention of the US Department of Defense, who were interested in the system in which the surgeon could operate remotely to perform surgery on soldiers, and soon this interest became practical. In 1990, the project team received an investment from the National Institutes of Health, hoping that they could develop prototypes for practical use as soon as possible.
In 1994, Dr. Frederic Moll was very interested in the system, when he worked under SRI director Guidant, and he repeatedly requested to commercialize "Lenny" (early Da Vinci robot) to maximize its value, however No one saw this at the time, everyone was busy how to make it a bit cooler.
So Frederic Moll called John Freund, who had just resigned from Acoson, and SRI successfully negotiated the intellectual property rights of Lenny Robot after several negotiations. Then in 1995, IntuiTIve Surgical Devices Inc was established. They introduced venture capital from the beginning, including investors in Field Fund, Sierra Leone Capital and Morgan Stanley.

The Da Vinci robot introduced the first generation in 1996, and the second-generation robotic arm launched in 2006 has a wider range of activities, allowing doctors to perform multi-picture observation without leaving the console. In 2009, based on the second generation of robots, the functions of dual console, analog controller, and intraoperative fluorescence development technology were added, and the third generation robot was introduced. The fourth generation of robots was launched in 2014, and the flexibility, precision, and image clarity have been improved. The company also developed a remote observation and guidance system in the second half of 2014.
The Da Vinci surgical robot is the most successful and widely used surgical robot in the world. It is widely used in general surgery, urology, cardiovascular surgery, thoracic surgery, gynecology, ENT, pediatric surgery. Da Vinci surgical robots are the most widely used in prostatectomy and are now increasingly used in heart valve repair and gynaecological surgery.
Working style and characteristics
Da Vinci surgical robot is mainly composed of three parts: 1, doctor control system; 2, 3D imaging video imaging platform; 3, mechanical arm, camera arm and surgical instruments constitute a mobile platform. During the operation, the surgeon does not directly contact the patient, and is operated and controlled by the three-dimensional vision system and the motion calibration system. The mechanical arm and the surgical instrument simulate the technical movement and operation of the doctor.

Way of working:
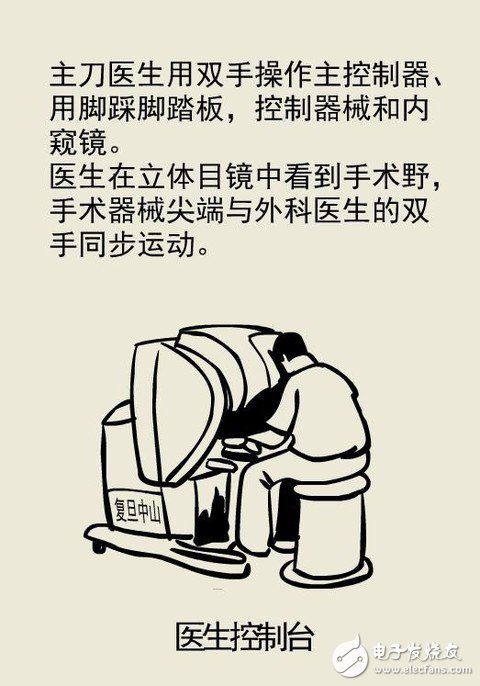
Surgeon console: The surgeon is sitting in the console, outside the sterile field of the operating room, using both hands (by operating the two main controllers) and the feet (via the foot pedals) to control the instrument and a 3D HD endoscope . As seen in the stereoscopic eyepiece, the surgical instrument tip moves in synchrony with the surgeon's hands.
Bedside Manipulator System: The PaTIent Cart is the operating component of a surgical robot whose primary function is to provide support for the instrument arm and camera arm. The assistant doctor works in the bedside robotic system in the sterile area and is responsible for changing the instruments and endoscopes to assist the surgeon in completing the operation. To ensure patient safety, the assistant doctor has higher priority over the movement of the bedside robotic system than the surgeon.
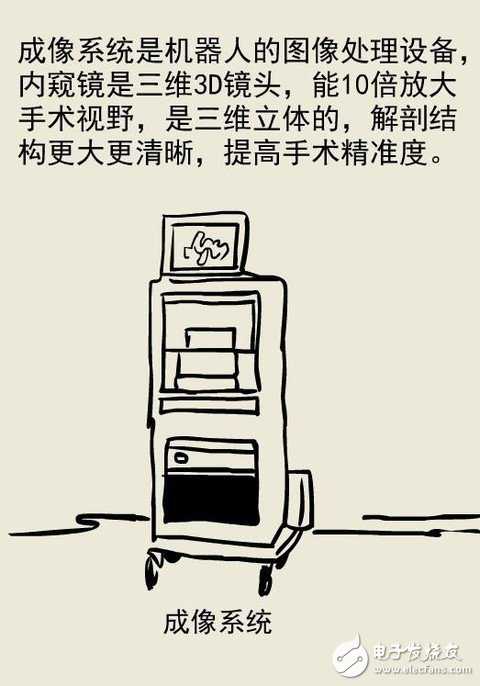
Imaging system: The imaging processor (Video Cart) contains the core processor of the surgical robot and the image processing equipment. It is located outside the sterile area during the operation, can be operated by the roving nurse, and can be placed with various auxiliary surgical equipment. The endoscope of the surgical robot is a high-resolution three-dimensional (3D) lens, which has a magnification of 10 times or more for the surgical field of view, and can bring a three-dimensional high-definition image of the patient's body cavity to the surgeon, so that the surgeon has more common laparoscopic surgery. It can better grasp the operating distance, more identifiable anatomical structure and improve the accuracy of surgery.
Our Musical Pen is good in quality and competitive in price. We are manufacturer and supplier of Musical Pen following your specific requirement. We are looking forward to your E-mail and establishing cooperative relationship with you! We would provide professional Musical Pen with good services for you!
Recordable Pen, Pen with Musical Note
AST Industry Co.,LTD , https://www.astsoundchip.com